東京大学工学部精密工学科
2018年度 五月祭展示
精密オープンラボ
ヒトを精密に知る
展示場所:6F
625

モーションキャプチャと呼ばれる装置を用い、ヒトの体にマーカをはりつけて撮影することで、ヒトの動きをリアルタイムに計測し解析する研究を行っています。同時に、筋電計と呼ばれる装置を用いて全身の筋肉の動きを計測します。高齢者と若年者の違いを調べることで加齢による変化を解析し、リハビリに応用することを目指しています。
製品・社会のエコデザイン
展示場所:10F
1026

本研究室では、計算機システムを用いて環境にやさしい製品や社会を設計する研究に取り組んでいます。ここでは、計算機システムを用いた簡単な実行例(デモ)を見ていただきます(スタッフが丁寧に説明します)。また、実験に用いている海外(アジア各国)の家電もあわせて展示します。
加工の未来を拓く特殊加工
展示場所:8F
830
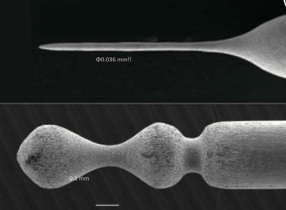
硬さによらず複雑形状を高精度に加 工できる方法に放電加工や電解加工 があります。本研究室では、世界 一微細な加工を実現したマイクロ放 電加工やマイクロ電解加工の展示を 行っています。また、電解液ジェッ ト加工という特殊な電解加工や透明 体電極を用いて放電加工や電解加工 の現象を初めて観察した動画などを 紹介しています。
細胞を見る・測る・制御する
展示場所:11F
1134
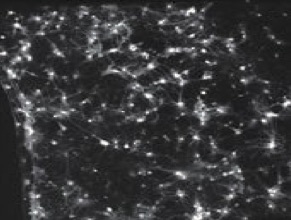
本研究室では、ネズミの脳から取り出した細胞やiPS細胞を培養して、電気活動を調べたり微細加工技術によって細胞の動きを制御したりしています。今回は、細胞の活動や運動を撮影した動画を紹介します。また、実際に顕微鏡をのぞいて細胞の様子を見ていただきます。(写真は細胞の活動した部分が発光したもの)
最新の手術支援技術紹介
展示場所:7F
722
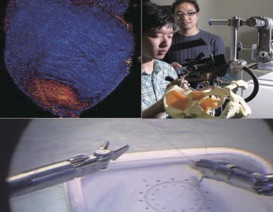
手術支援ロボット、安全性の高いメス、不整脈治療技術など、医療を支える様々な工学技術を紹介します。
3次元形状モデリング技術
展示場所:9F
921
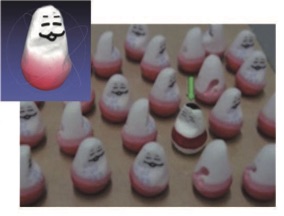
本研究室では「3Dコピー」を題材にして、複雑なかたちをコンピュータ上で自在に扱うための技術を紹介します。3Dスキャンによる形状取得と3Dプリンタによる造形、そしてその間をつなぐ形状モデリング技術をデモします。
インタラクティブ・メカトロニクス
展示場所:6F
630

静電気で動くリニアモータや、仮想物体などに触れた際の手触りをバーチャルに伝える触力覚インタフェースデバイスなどの、メカトロニクス技術、および、インタラクティブシステム技術に関する体験デモ展示を行います。
※各企画の展示場所はフロアマップもご参照ください。